Los investigadores del CMU crearon un nuevo robot patas de cabra, el cual alcanza 20 joules en los experimentos de salto, y una altura de 82cm, más del doble de su propia altura.
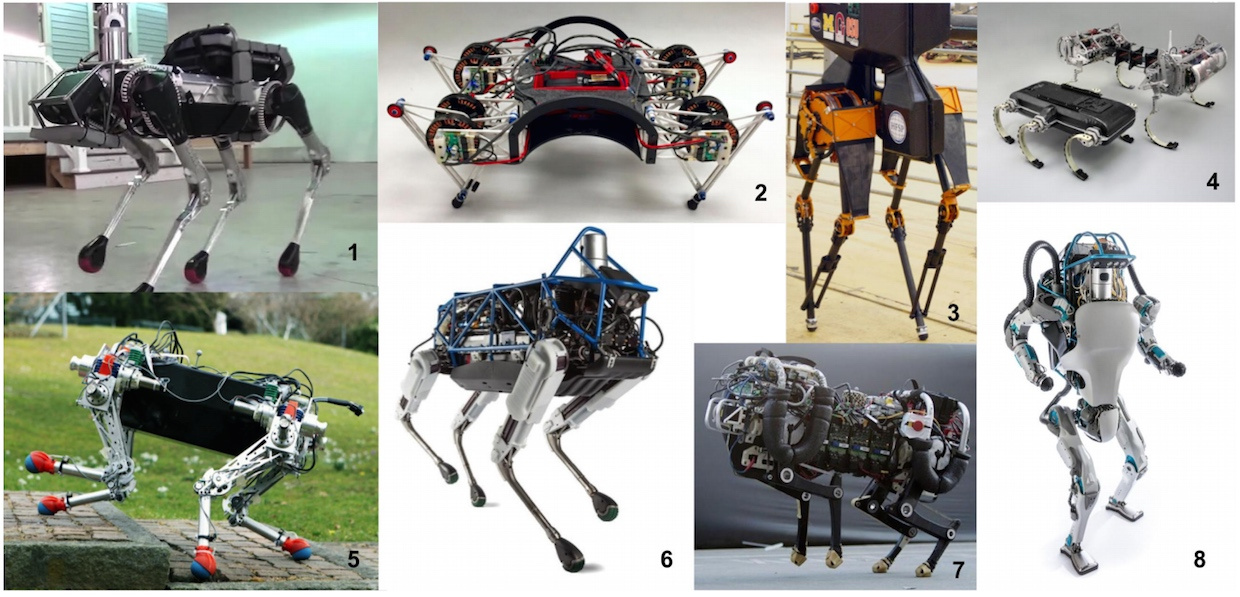
La mayoría de los robots con piernas o patas son identificados fácilmente debido a su apariencia. Tal vez sean extremidades como las de los humanos, mamíferos, aves, pero bueno piernas son piernas. Las cosas comienzan a ponerse interesantes cuando los robots con patas representan diseños que no son usualmente encontrados en la naturaleza, por ejemplo el RHex, el cual tiene 6 piernas largas que funcionan como llantas elásticas que le permiten hacer algunas acrobacias increíbles.
Patas de Cabra. Robot impresionante.
En la Universidad Carnegie Mellon, Simon Kalouche terminó recientemente su tesis para maestría en la cual habla de una nuevo sistema con piernas para caminar, correr y lo más importante dar saltos explosivos omnidireccionalmente y hacer un aterrizaje completo. Esas son el tipo de cosas que nos gusta escuchar.
Kalouche desarrolló las patas de cabra (GOAT), las cuales son una abreviación de “Gearless Omni-directional Acceleration-vectoring Topology.” que significa «Topología de aceleración-vectorizada omnidireccional sin engranaje «. El diseño de las patas del robot tienen poco que ver con la estructura física de las patas reales de una cabra, pero Kalouche se inspiró directamente de las cabras de montaña, que muestran la locomoción casi sobrenatural en los acantilados.
En lugar de intentar imitar la biología de las cabras, Kalouche se centró en como dar habilidades de las cabras a las partes reboticas, como las piernas, lo que resultó una novela y un alto sistema paralelo dinámico impulsado por un trío de motores eléctricos. Las patas de cabra son muy dinámicas, y ¿mencionamos que son muy dinámicas? Debido a que son muy dinámicas:
Para lograr la movilidad dentro de un amplio conjunto de topografías del terreno tales que abarca entornos estructurados y no estructurados un robot ideal deberá emplear tanto movimientos altamente estables (escalar o caminar), así como las maniobras de agilidad altamente dinámicas (por ejemplo, saltar, reorientación de inercia, aterrizaje controlado, etc.) para atravesar de forma óptima el terreno donde se encuentre.

Las patas de cabra utilizan un actuador de accionamiento directo, impulsado por un motor T-U10, acoplado a un sistema de engranajes planetario Matex 1:7
Con muy pocas excepciones especificas, los robots con patas no son capaces de realizar movimientos dinámicos. Los humanoides son malos particularmente para actividades como correr y saltar. Recientemente los robots cuadrúpedos han comenzado a ser más eficientes en sus habilidades de locomoción, que a comparación los humanos y especialmente animales lo hacen naturalmente bien. Aun así las piernas o patas de robots no son capaces de realizar las actividades que las piernas o patas reales pueden hacer. Se estima que no es posible acceder al 50% del territorio del planeta por medio caminos y ruedas, esa es la situación específica por el que las patas de cabra (GOAT) fue creado:
- Existen en la actualidad terrenos sin estructura que constantemente son intransitables por medio de ruedas o en este caso robots con patas.
- Obstáculos con variaciones altas y elevación pronunciada del terreno (en relación con la altura de los robots) la creación de trayectorias discontinuas para caminar (es decir hay un límite a la pendiente de un terreno sobre el cual se puede caminar y que es de alrededor de 45 grados para los seres humanos).
- Pozos, zanjas, agujeros y cavidades que también crean discontinuidades en un sendero.
- Lugares pequeños y estrechos en los cuales dar la vuelta o reorientar el robot para después caminar no es posible o por lo menos no es lo ideal.
- Misiones a larga distancia sobre terrenos en donde diferentes posturas o modos de locomoción pueden mejorar tanto la movilidad, la eficiencia y la longevidad.
Kalouche tiene planes de integrar las piernas de cabra (GOAT) a una amplia variedad de diferentes robots morfológicos incluyendo monopodos, bípedos, tripedos y cuadrúpedos.
Una de las cosas que aparta las patas de cabra (GOAT) de cualquier otro tipo de sistemas de piernas para robots es que no están limitados sus movimientos, haciendo mucho más fácil su movimiento en diferentes direcciones sin necesidad de reorientarlo. Las piernas de cabra (GOAT) son partes mecánicas robustas, y también brinda una conformidad virtual (gracias a un controlador de impedancia modificado). Y con sus tres motores eléctricos montados en la cadera brinda una gran cantidad de torsión distribuida, manteniendo la inercia en las mismas piernas.

Una representación en CAD de un robot de 4 patas Goat
Más allá de eso, Kalouche tiene planes para integrar la pierna cabra (GOAT) en una variedad de diferentes morfologías de robots, incluyendo monopodos, bípedos, trípedos, y que cuadrúpedo en la prestación anterior.
Debido a que la pierna es capaz de suministrar la fuerza omnidireccional de un bípedo o cuadrúpedo utilizando la topología de la pierna, lo más probable es que el sistema no tenga un coportamiento normal como los animales. Los cambios repentinos de dirección mientras se está caminando o corriendo, podría ser el verdadero potencial de movilidad especial para los robots del futuro que ha sido invisible hasta hoy en día.
Si gustas puedes leer toda la tesis de maestría de Kalouche aquí.
Fuente: Spectrum IEEE



