Cuando eramos niños todos soñábamos con un carro de radiocontrol, pero muy pocos nos atrevimos a descubrir cómo es que funcionan esos pequeños autos. En el corazón del sistema existe un chip todo incluido con transmisor y receptor, específicamente diseñado para los Carros de radiocontrol, este chip se llama TX-2B/RX-2B. Este es un chip bifunciónal, lleva a cabo la codificación y la decodificación de los datos. Todas las demás funciones, incluyendo la transmisión y la recepción, se realizan mediante circuitos de transistores discretos.
El diseño del transmisor del auto de radiocontrol.
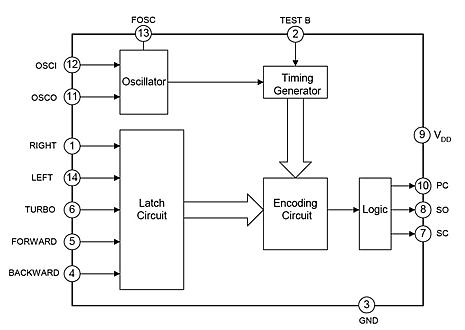
Vamos a empezar a analizar el circuito transmisor ubicado en el control. El diagrama de bloques para el TX – 2B se muestra a continuación en la Figura 1. El TX – 2B se encarga de la codificación para cinco funciones diferentes (adelante, atrás, izquierda, derecha, y turbo). Cuando se pulsa un botón, un código digital que representa una de estas funciones sale en serie al pin 8. La frecuencia de esta señal de datos es de aproximadamente 1 kHz.
Ahora veamos el esquemático circuito completo del transmisor en la figura 2 (obtenido del datasheet del TX-2B).

Un simple Regulador zener de 3V se ha creado usando D1 y R5 para alimentar el TX – 2B.
Rosc establece la frecuencia del oscilador interno del TX – 2B a 128 kHz.
La señal portadora de 27 MHz se genera por el circuito oscilador formado con X1 , Q1 , y L1.
R1 establece la corriente de polarización para el Q1, mientras que R2 proporciona una protección de límite de corriente.
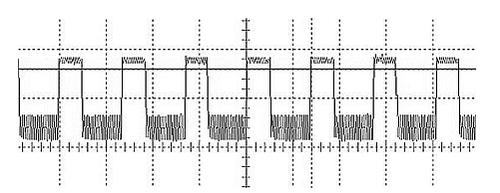
La señal de datos codificada en el pin 8 del TX – 2B se acopla entonces con la señal portadora a través de C1.
La señal acoplada se muestra a continuación en la Figura 3.
Esta señal se introduce en la etapa de ganancia AC formada por Q2 y L2. Debido a la gran magnitud de la señal de datos, esta etapa de ganancia sólo se activa cuando la línea de datos es alta. Cuando la línea de datos es alta, la señal portadora de 27 MHz se amplifica, pero cuando la línea de datos es baja la etapa de ganancia Q2 se apaga. La forma de onda resultante en el colector de Q2 es simplemente la señal portadora amplificada encendiéndose o apagándose por la señal de datos.
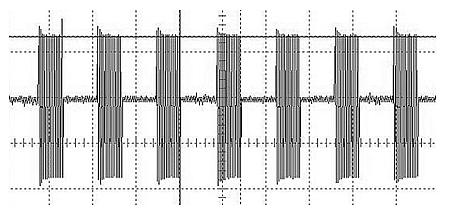
Este método de radio comunicación es llamado onda continua (continuous wave en inglés, abreviado CW) de radio. La «onda continua» es la manera más simple de transmisiones de radio, de hecho es el método de radio comunicación que usan las maquinas de telégrafos para transmitir la clave Morse. La señal de onda continua en el colector de Q2 se muestra a continuación en la Figura 4.
La señal de la onda continua está acoplado a la CA a través del C2 para eliminar cualquier componente de CD restante. Una Pi-Network que consta de L3, C3, y C4, junto con el L4, se utiliza para la adaptación de impedancia con la antena. Se requiere una adecuada adaptación de impedancia ya que es crítica para la optimización de la eficiencia de la antena.
Diseño del Receptor.
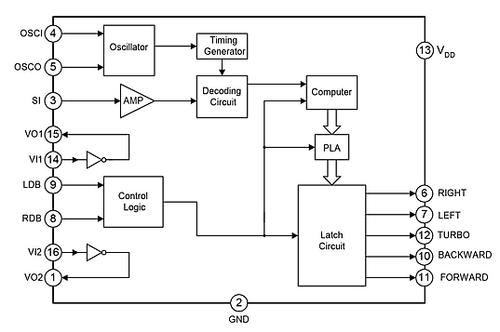
El circuito receptor situado en el Carrito es un poco más complicado que el circuito transmisor. Esto es en parte debido a que también incluye puentes H para manejar dos motores (el de propulsión y el de dirección) . La figura 5 muestra el diagrama de bloques para el RX – 2B.
La señal de datos codificada de 1 kHz se introduce en el pin 3, así, se amplifica y decodifica internamente. Una vez que la función correspondiente se ha determinado a partir de la señal decodificada, el pin de salida apropiada está habilitado para tener las funciones de movimiento hacía adelante, atrás, derecha, izquierda o turbo. El Esquemático completo para el circuito receptor (obtenido de la hoja de datos RX- 2B) se muestra en la Figura 6.
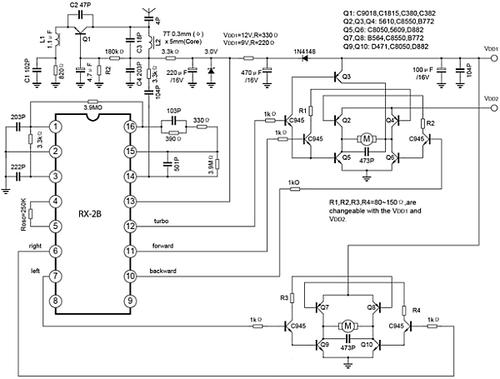
El receptor es el circuito construido alrededor de Q1. Este tipo de receptor se conoce como un receptor regenerativo, ya que utiliza una retroalimentación positiva. Un circuito LC sintonizado que consiste en L2 y C3 proporciona retroalimentación positiva pero sólo a la frecuencia sintonizada (27 MHz). Así que esto significa que sólo la señal deseada se amplifica por la retroalimentación positiva. Una desventaja de este tipo de receptor es que L2 debe embobinar adecuadamente con el fin de sintonizar con precisión el receptor.
La señal de salida del circuito receptor va en el pin 14 en el RX- 2B. Esta señal es ahora un filtró para eliminar el portador y el paso entre los dos inversores internos. En el momento en que la señal llega al pin de entrada del RX – 2B (pin 3), esta ya se ha filtrado y limpiado lo suficiente para mantener sólo la señal de datos de 1 kHz. Al igual que con el TX- 2B, un diodo zener 3V se utiliza para alimentar el RX- 2B. La resistencia Rosc establece la frecuencia del oscilador interno de 128 kHz.
Dos circuitos de puente H estándar se utilizan para el motor de propulsión y el motor de dirección. El puente H permite que la dirección del motor sea controlada por la conmutación del flujo de corriente, entre el puente H y el motor. El circuito que se muestra en la hoja de datos del RX – 2B tenía varios errores que han sido corregidos en el esquemático que se muestra arriba. La función turbo aumenta la corriente a través del motor de propulsión (vía Q3), pero sólo cuando se selecciona la dirección de avance.
Diseño de la antena.
Usar una frecuencia portadora más baja, como de 27 MHz, tiene varias ventajas. Esto permite que los dispositivos más lentos y de menor costo puedan utilizar secciones de radiofrecuencia (RF). En segundo lugar, el diseño no es tan sensible a los efectos de diseño del PCB. Finalmente, para la misma potencia de salida de una onda portadora de frecuencia más baja ofrecerá una rango mayor en comparación con las frecuencias más altas. La gran desventaja es que las frecuencias portadoras bajas requieren antenas más grandes.
Los coches controlados por radio utilizan una antena monopolo. Una antena monopolo imita una antena dipolo mediante el uso de las propiedades reflectantes de un plano de tierra, en este caso la propia Tierra. Para la máxima eficiencia de la antena necesita ser diseñada para resonar a la frecuencia portadora deseada. Para lograr esto, la longitud de la antena tiene que ser igual a 1/4 de la longitud de onda de las ondas de radio que se comunican. La longitud de onda se puede calcular usando:
Longitud de onda = velocidad de la luz / Frecuencia
La velocidad de la luz en el vacío es de 300 x 106 m/s, pero es aproximadamente un 5% más lenta en un metal. Así que asumiendo una antena de 1/4 de longitud de onda, y un vehículo 27 MHz, la longitud de la antena debe ser:
Longitud de la antena = (0.95 x 0.25 x 300 x 106) / (27 x 106) = 2.6 meters
Sin embargo, 2.6 metros es demasiado para una antena con una aplicación de un pequeño coche de juguete. Se puede utilizar una antena en espiral para obtener la longitud requerida, o una bobina de carga para hacer resonar a la antena a una longitud más corta. O bien, se puede utilizar una antena telescópica de aproximadamente 15 pulgadas de largo. El uso a cortas distancias produce una baja eficiencia en una antena, y por tanto reduce drásticamente su rango. Sin embargo, para un juguete de corto alcance el rango al que se reduce es aceptable. El ahorro en los costos al utilizar una baja frecuencia es mucho mayor, aunque el rango se reduzca para producir productos baratos.
Así es como funciona un Carrito de radiocontrol; existen muchos ingenieros que nacieron con esa pasión de descubrir cómo funcionan las cosas, así que por favor compártenos y cuéntanos qué juguetes te gustaría desarmar.




{kind=link}
{kind=link}