



Motorreductor metálico 37Dx73L mm 131:1 con Encoder 64 CPR
PRODUCTO SUJETO A INVENTARIO, MAS INFORMACIÓN AQUI
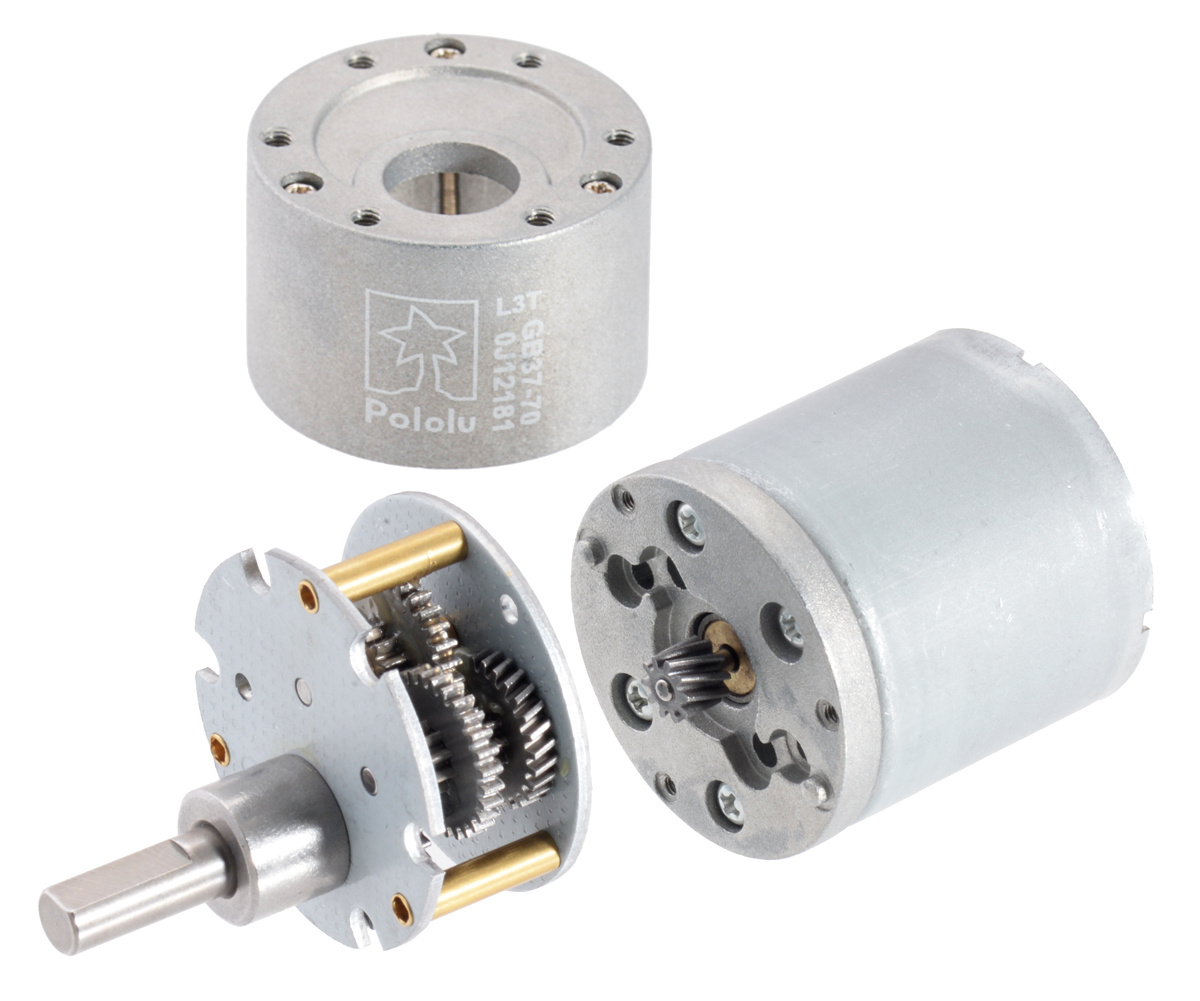
Este Motorreductor metálico 37Dx73L es un potente motor de Corriente Directa, cuenta con una caja de engranajes de metal con una relación 131.25: 1. Está diseñado para operar con 12V DC. La caja de engranes se compone principalmente de engranajes rectos, pero también cuenta con engranajes helicoidales para la primera etapa, con lo que se logra reducir el ruido y mejorar la eficiencia.
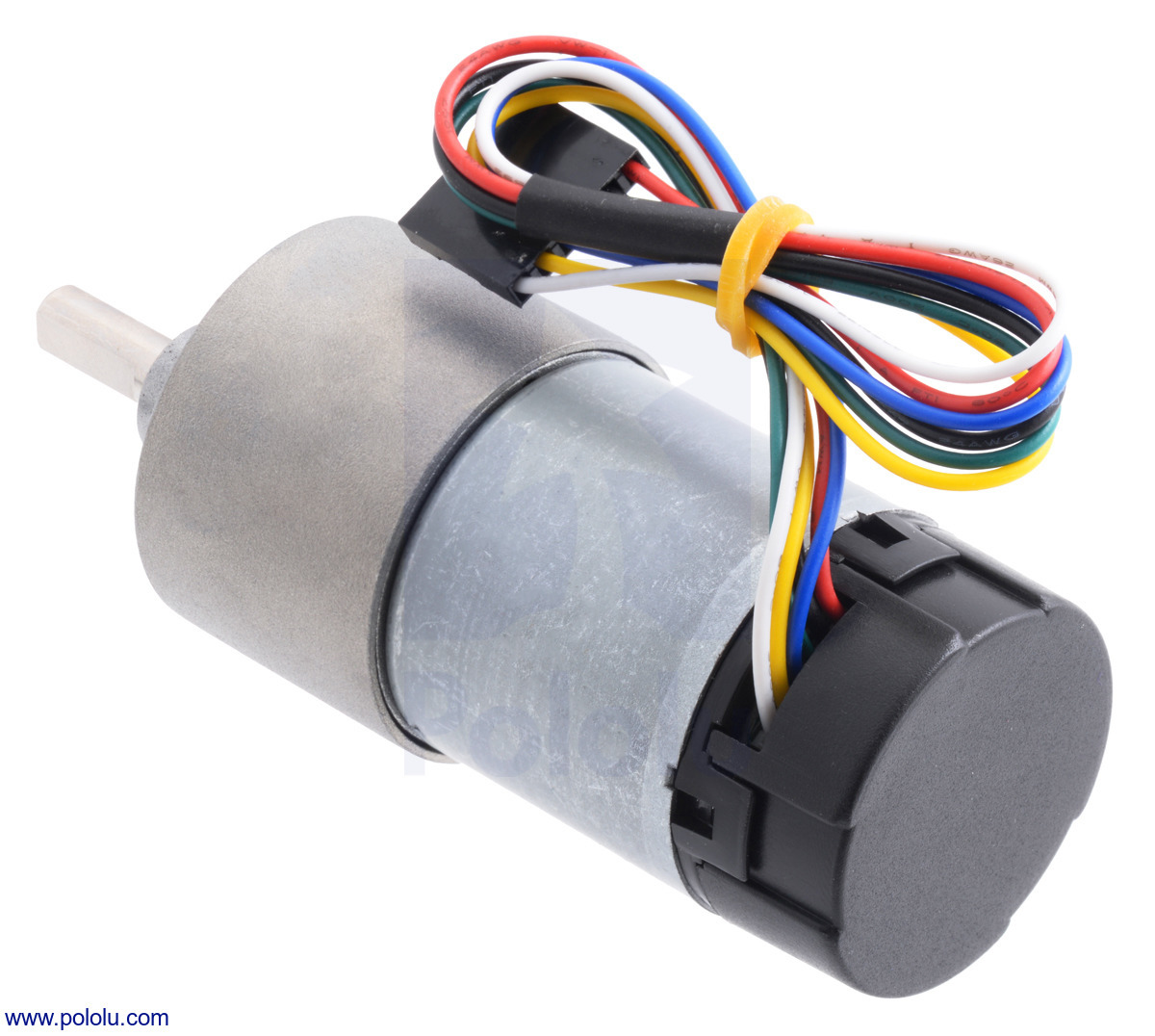
Estos motores tienen un eje de salida en forma de D, de 16 mm de largo y 6 mm de diámetro. Además cuenta con un encoder ya integrado, que te va permitir contar el número de revoluciones (vueltas) del motor y así establecer un control de su movimiento.
Especificaciones importantes del motorreductor.
| Voltaje | Rendimiento sin carga | Carga máxima |
|---|---|---|
| 12 V | 76 RPM, 150 mA | 45 kg⋅cm (630 oz⋅in), 5.5 A |
Nota.
La sobrecarga en los motorreductores puede disminuir considerablemente su vida útil e incluso provocar daños en el mecanismo o en las escobillas. Para evitar dañar la caja de engranajes, recomendamos mantener las cargas aplicadas continuamente por debajo de 10 kg-cm (150 oz-in), y el límite superior recomendado en picos de carga es de 25 kg-cm (350 oz-in). Las paradas repentinas en el giro también pueden provocar daños térmicos (potencialmente del orden de segundos) en los devanados y escobillas del motor. Una recomendación general para el funcionamiento del motor de DC con escobillas es mantener el 25% o menos, en la exigencia de corriente.
Motorreductor metálico 37Dx73L.
Características.
Es un poderoso motor de Corriente Continua (o VDC) con redutcor, hay una amplia variedad relaciones en sus engranajes. Además, cuentan con un sistema de enconder de cuadratura, con 64 pasos por revolución (CPR), en el eje del motor.
Estos motores están diseñados para usarse a 12 VDC, aunque en general, este tipo de motores pueden funcionar a voltajes por encima y por debajo del voltaje nominal (comienzan a girar a voltajes tan bajos como 1 V). Los voltajes más bajos podrían no ser prácticos, y los voltajes más altos podrían comenzar a afectar negativamente la vida útil del motor.
Las cajas de engranajes se componen principalmente de engranajes rectos, pero cuentan con engranajes helicoidales para la primera etapa y así se logra reducir el ruido y mejorar la eficiencia en general del motorreductor:
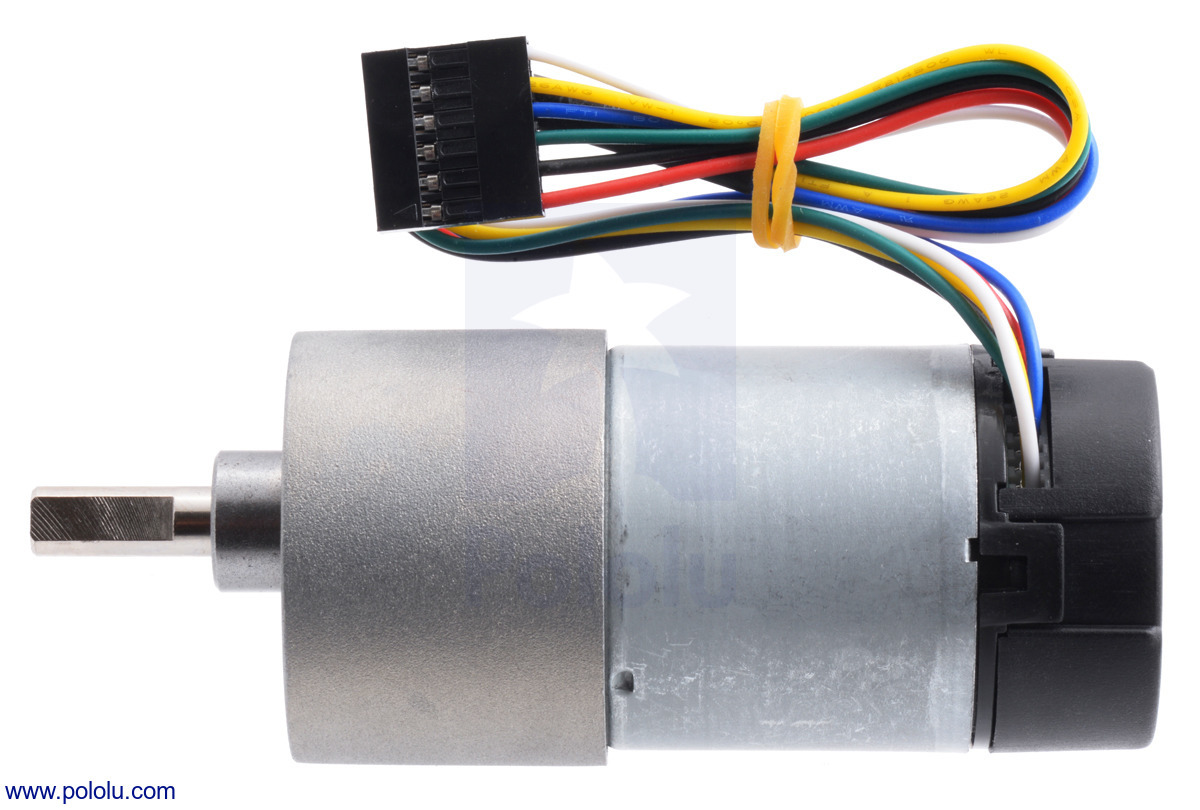
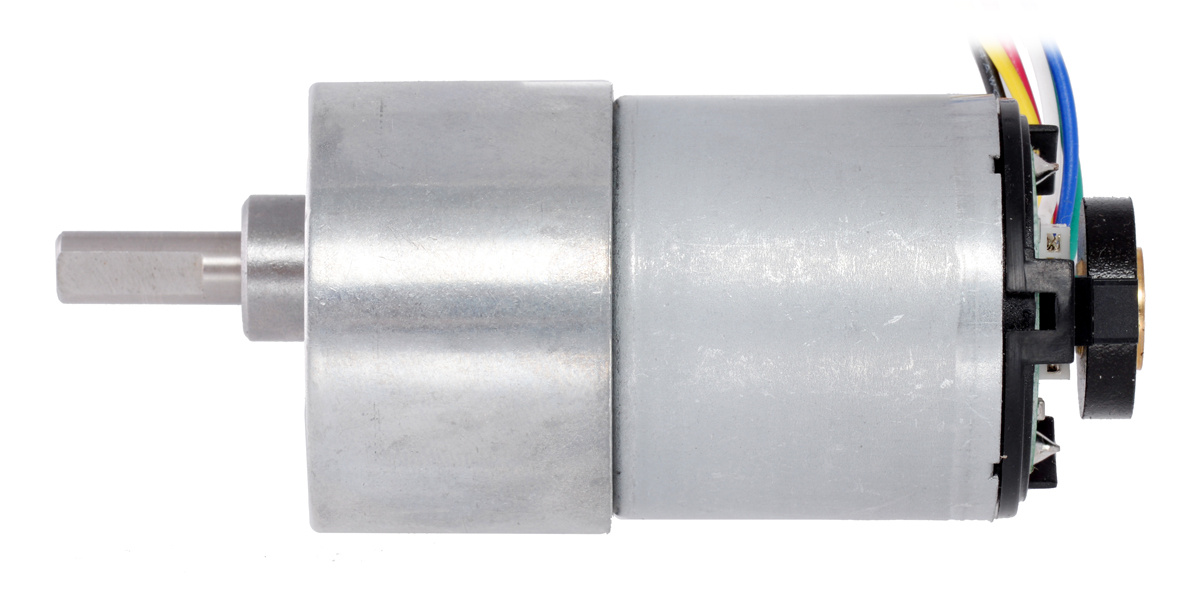
La sección del sistema de encoder está protegida con una carcasa plástica color negro, así como se ve en las imágenes siguientes:
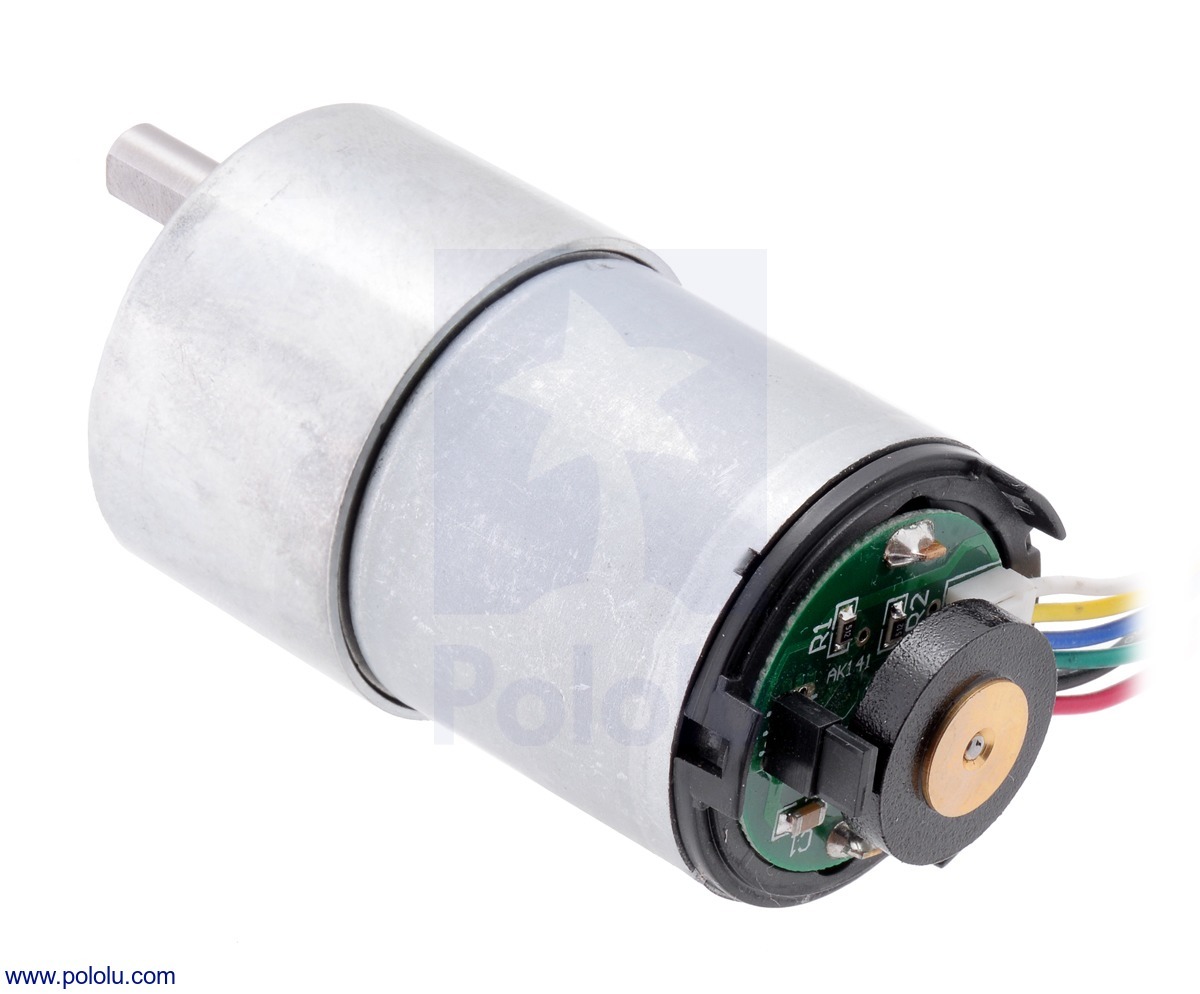
La carcasa plástica se puede quitar si necesitas revisar el sistema de encoder, o si deseas reducir ligeramente el tamaño total del motorreductor. Aunque aún así queda un poco de plástico en la base, como se muestra en las imágenes a continuación:
Especificaciones técnicas.
El motor cuenta con una caja de engranajes de metal con una relación 131.25: 1 y un encoder de cuadratura integrado que proporciona una resolución de 64 pulsos por cada revolución del eje del motor. Esto corresponde a 8400 pulsos por revolución del eje de salida de la caja de engranes.
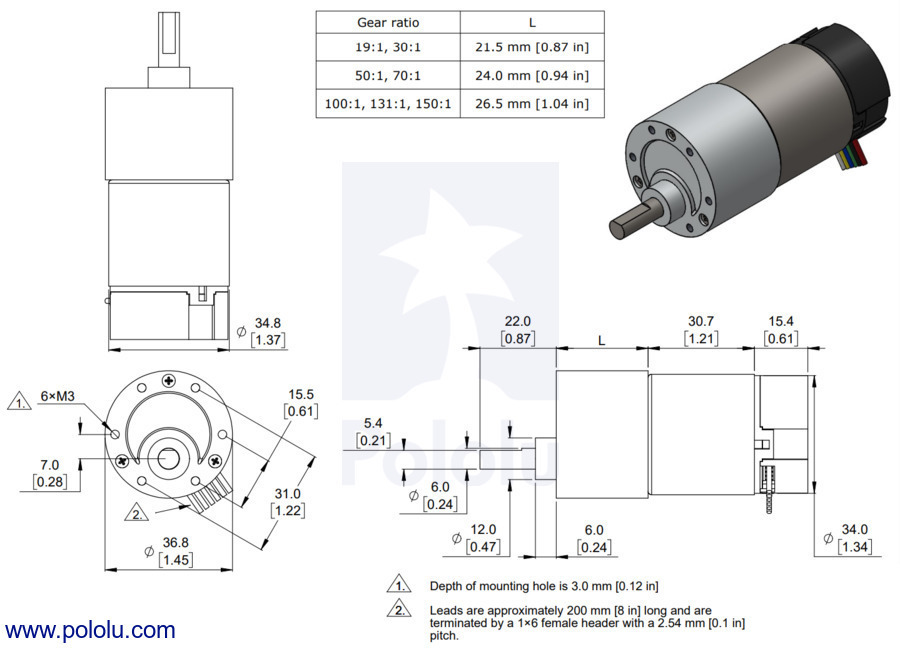
Dimensiones.
¿Cómo usar el encoder?
El motorreductor tiene un encoder de efecto Hall de dos canales. Con esto se detecta la rotación de un disco magnético que se encuentra en la parte trasera del eje del motor. El encoder de cuadratura proporciona una resolución de 64 pulsos por revolución del eje del motor al contar ambos bordes de ambos canales.
Para calcular los conteos por revolución de la salida de la caja de engranajes, multiplica la relación de engranes por 64. El motor / encoder, tiene seis cables identificados por un color. Este cable mide 8 «(20 cm) y cuenta con una terminal (header) hembra de 1 × 6 con espacio de 0.1» entre cada orificio, así como se muestra en la imagen principal del producto.
Esta terminal se puede acoplar fácilmente también con headers macho estándar de 0.1 ″. Si este header no es conveniente para tu aplicación, puedes sacar los cables de la terminal plástica o simplemente cortarlos.
La siguiente tabla muestra las funciones de cada cable:
| Color | Función |
|---|---|
| Rojo | Alimentación del motor (está conectado directamente a una terminal interna del motor) |
| Negro | Alimentación del motor (está conectado directamente a una terminal interna del motor) |
| Verde | Encoder GND |
| Azul | Encoder Vcc (3.5 – 20 V) |
| Amarillo | Encoder Pin de salida A |
| Blanco | Encoder Pin de salida B |
El sensor Hall requiere de un voltaje de entrada, Vcc, puede ser de entre 3.5 y 20 V. Consume un máximo de 10 mA. Las salidas A y B son ondas cuadradas de 0 V a Vcc aproximadamente con 90° fuera de fase. La frecuencia de las transiciones te indica la velocidad del motor, y el orden de las transiciones te indica la dirección.
La siguiente captura de pantalla de un osciloscopio muestra las salidas del encoder en sus pines A y B (A-amarillo y B-blanco) utilizando un voltaje en el motor de 12 V y el sensor efecto Hall Vcc de 5 V:

Al contar las fases ascendentes y descendentes de las salidas A y B, es posible obtener 64 pulsos por cada revolución del eje del motor. El uso de una sola señal de un canal da como resultado 16 pulsos por revolución del eje del motor, por lo que la frecuencia de la salida A en la captura de pantalla del osciloscopio anterior es 16 veces la frecuencia de rotación del motor.
Accesorios.
Aquí encuentras algunos accesorios para tu motor.
Hub Universal Pololu de Aluminio – Para ejes de 6mm tipo D.
Base de aluminio tipo L – Para motores Pololu.
Tarjeta controladora DUAL 2 Canales para Motores Pololu de 30 Ampers.
Controlador individual 1 Canal para Motor Pololu.
Ver fabricante Pololu aquí.
Debes acceder para publicar una valoración.
También te recomendamos…
Productos relacionados
-

Motorreductor metálico 37Dx73L mm
$779.00 IVA Incluido Añadir al carrito -
Mini bomba de aire de 6v
$79.00 IVA Incluido Añadir al carrito -
Motor a Pasos – NEMA 17 – 200 pasos/rev,
$350.00 IVA Incluido Añadir al carrito -
Motor a pasos NEMA-11.
$649.00 IVA Incluido Añadir al carrito -
Mini bomba de aire de 3v
$89.00 IVA Incluido Añadir al carrito -
Micromotor Metálico Pololu 2.2Kg-cm 100
$240.00 IVA Incluido Añadir al carrito






Valoraciones
No hay valoraciones aún.