Un servomotor (o servo) es un tipo especial de motor con características especiales de control de posición. Al hablar de un servomotor se hace referencia a un sistema compuesto por componentes electromecánicos y electrónicos.
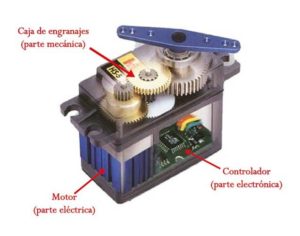
El motor en el interior de un servomotor es un motor DC común y corriente. El eje del motor se acopla a una caja de engranajes similar a una transmisión. Esto se hace para potenciar el torque del motor y permitir mantener una posición fija cuando se requiera. De forma similar a un automóvil, a menor mayor velocidad, menor torque. El circuito electrónico es el encargado de manejar el movimiento y la posición del motor.
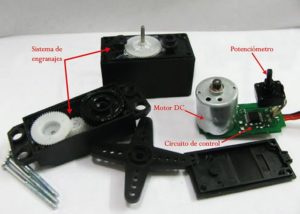
La presencia del sistema de engranajes como el que se muestra en la figura hace que cuando movemos el eje motor se sienta una inercia muy superior a la de un motor común y corriente. Observando las imágenes que hemos presentado nos podemos dar cuenta que un servo no es un motor como tal, sino un conjunto de partes (incluyendo un motor) que forman un sistema.
Tipos de servomotores
Existen servomotores para todo tipo de usos. En la industria, la robótica, en el interior de las impresoras, máquinas CNC, etc. Para los efectos de este post nos interesan los servomotores de modelismo, que son los utilizados en prototipos de robótica. No tomaremos en cuenta los servomotores del tipo industrial.
 Servomotor industrial
Servomotor industrial
 Servomotor de modelismo
Servomotor de modelismo
Los servomotores de modelismo operan a voltajes bajos en corriente directa, típicamente entre 4 y 6 voltios. Los servomotores industriales operan tanto en DC como en AC (monofásico o trifásico). Para mí es un poco difícil escribir sobre este tipo de temas debido a que nunca he tenido la oportunidad de trabajar con un servo industrial. Lo que sé sobre ellos es por lo que he leído o lo habré visto en algún video o seminario. Los servos de modelismo, en cambio, se pueden adquirir a muy bajo costo en Internet y son populares entre los usuarios de Arduino.
Se debe resaltar que, dentro de los diferentes tipos de servomotores, éstos se pueden clasificar según sus características de rotación.
- Servomotores de rango de giro limitado: son el tipo más común de servomotor. Permiten una rotación de 180 grados, por lo cual son incapaces de completar una vuelta completa.
- Servomotores de rotación continua: se caracterizan por ser capaces de girar 360 grados, es decir, una rotación completa. Su funcionamiento es similar al de un motor convencional, pero con las características propias de un servo. Esto quiere decir que podemos controlar su posición y velocidad de giro en un momento dado.
Los servomotores de rango de giro limitado se pueden adecuar para que funcionen como servomotores de rotación continua. Sin embargo, si requerimos un servo de 360 grados es mejor comprar uno que haya sido diseñado para este tipo de uso.
Funcionamiento de un servomotor
Los servomotores poseen tres cables, a diferencia de los motores comunes que sólo tienen dos. Estos tres cables casi siempre tienen los mismos colores, por lo que son fácilmente reconocibles.
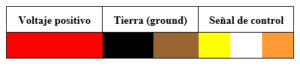
Colores comunes de los cables de un servomotor
Los colores dependerán del fabricante, pero difícilmente nos equivocaremos a la hora de reconocer los terminales del un servo. La necesidad de una señal de control para el funcionamiento de este tipo de motores hace que sea imposible utilizarlos sin un circuito de control adecuado. Esto se debe a que para que el circuito de control interno funcione, es necesaria una señal de control modulada. Para esto se utiliza modulación por ancho de pulsos, es decir, PWM.
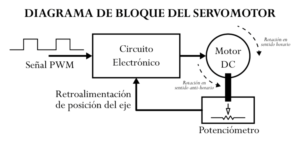
El diagrama de bloque del servomotor representa de forma visual el servomotor como un sistema. El circuito electrónico es el encargado de recibir la señal PWM y traducirla en movimiento del Motor DC. El eje del motor DC está acoplado a un potenciómetro, el cual permite formar un divisor de voltaje. El voltaje en la salida del divisor varía en función de la posición del eje del motor DC.
Gráficos sobre la variación del voltaje en el divisor de un potenciómetro en función del movimiento de la perilla.
De forma similar, cuando el eje del motor modifica la posición del potenciómetro, el voltaje en la terminal central varía. El potenciómetro permite que el circuito de control electrónico pueda retroalimentarse con la posición del motor en un momento dado. Esto, en Teoría de Control se conoce como un sistema de lazo cerrado.
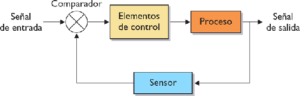
Representación en diagrama de bloques de un sistema de lazo cerrado
Los servomotores de rotación continua desacoplan el potenciómetro del eje del motor. Esto impide que el circuito de control pueda leer la posición del eje, por lo cual provoca un movimiento continuo al no ser capaz de cumplir la condición para que el servo se detenga. Los servomotores de rotación continua normalmente pueden girar en un sentido o en otro y detenerse. Podemos modificar la velocidad de giro, pero no podremos lograr, por ejemplo, que el servo se mueva una determinada cantidad de grados y luego se detenga.
Las señales de PWM requeridas para que el circuito de control electrónico son similares para la mayoría de los modelos de servo. Esta señal tiene la forma de una onda cuadrada. Dependiendo del ancho del pulso, el motor adoptará una posición fija.

Ancho de pulsos para lograr diferentes posiciones en un servomotor (180º, 135º, 90º, 45º y 0º)
Las señales que vemos en la imagen son las que permiten que el eje del motor adquiera determinada posición. Éstas señales deben repetirse en el tiempo para que el motor mantenga una posición fija.
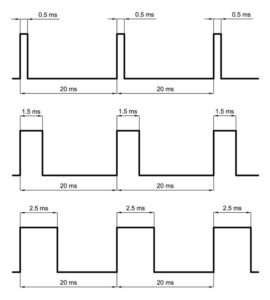
Ejemplos de trenes de pulsos para las posiciones 180º, 90º y 0º en el eje de un servomotor
La duración del ciclo de trabajo varía entre 15 y 25 milisegundos. Las ondas mostradas en la imagen anterior representan ejemplos de trenes de pulsos con los que se puede mover un servomotor, utilizando un ciclo de trabajo de 20 milisegundos.
Este tren de pulsos puede ser generado por un circuito oscilador (como un 555) o por un microcontrolador. Es decir, con Arduino podemos controlar fácilmente un servomotor. De hecho en Arduino existen las librerías para el control de servos de forma nativa. No es necesario descargarlas.
Puedes encontrar servomotores en nuestra pagina y elegir el que te agrade mas.


{kind=link}
{kind=link}