Para aquellos que han conducido automóviles del siglo pasado y los más recientes, conocen la diferencia de conducir el auto de reversa utilizando sólo los espejos laterales y retrovisor, y ser ayudado con sensores. Estamos seguros que tú también has visto automóviles con una especie de botones circulares pegados en la parte de atrás (y probablemente adelante). ¿Cómo funcionan los sensores de reversa de un Coche? Aquí te explicamos su funcionamiento.
Este artículo está basado en la historia original contada por Haris en su sitio web candrian.gr. Gracias a su curiosidad, trabajo, investigación y conocimientos, escribió el funcionamiento de todo el sistema de sensores y circuito electrónico. Este artículo está tropicalizado al español para una mejor comprensión de la comunidad.
Comenzamos…
Haris-
Han pasado dos años desde mi última publicación, como puedo ver en la última fecha. Pero finalmente parece que encontré el momento de regresar. La idea de hacer ingeniería inversa a los sensores para estacionarse me surgió cuando cambié esos sensores en mi propio auto, y tenía curiosidad por saber cómo funcionaban realmente.
Primer impresión.
En general, tenía una imagen en mi mente sobre cómo deberían funcionar. La bocina que envía el sonido y un micrófono/ receptor que lo recibe (justo así como funciona un radar), se calcula el tiempo en que el sonido tarda en viajar desde la bocina al micrófono, chocando y rebotando con el obstáculo al frente. Tener 4 sensores en la defensa del automóvil apuntando en la misma dirección, es un desafío para el procesador que tiene que reconocer qué sonido proviene de qué sensor. Un pensamiento rápido que hice es que cada sensor puede usar una frecuencia de operación diferente, o quizás un intervalo de tiempo diferente para cada sensor, manteniendo la misma frecuencia. Pero lo descubriremos más adelante. Mientras tanto mantengamos esta primera idea en la mente.

La primera cosa interesante que me llamó la atención mientras estaba quitando los sensores de la defensa de mi auto fueron los sensores mismos. Tenían solo dos cables cada uno, por lo que la imagen en mi mente con un micrófono y una bocina emisora, cada uno independiente del otro, en cada sensor, cambió de inmediato a un sólo dispositivo. Un dispositivo que puede cambiar de ser una bocina a ser un micrófono y viceversa (operando ambos como una bocina y un micrófono). Es que solo hay dos cables, por lo que no podría haber dos componentes diferentes, como una bocina y un micrófono. Si eso fuera cierto, debería haber al menos 3 cables, un cable para cada componente (bocina y micrófono) y un tercer cable compartido para la tierra común (Ground).

Segunda.
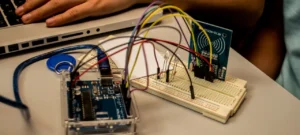
Mi segundo paso (después de la primera investigación visual) desatornillé y quité el gabinete de la unidad de procesamiento principal para tener acceso directo al diseño de PCB (Placa electrónica – Printed circuit Board – Siglas en Inglés). A primera vista podemos ver (Imagen 1 de aquí arriba) que el procesador principal es el Circuito Integrado Atmel (AT89C2051). Cuenta un Trigger Schmitt (HEF40106B) que se puede usar para aislar/separar de la parte frontal analógica del procesador/circuito principal. La placa también tiene dos amplificadores operacionales (HA17358) con algunos componentes externos a su alrededor, que parece ser usado para filtrar y amplificar las señales recibidas. Y un tercer Circuito Integrado que, después de algunas búsquedas en Google, descubrí que es un interruptor analógico (HEF4066B). Todavía no puedo imaginar para qué se ocupa, ya que podría haber muchos usos como por ejemplo el escaneo de señales entre los 4 sensores o para cambiar cada modo de sensor de receptor a transmisor, etc.

Más de cerca.
Revisando más de cerca los conectores del sensor en el PCB, podemos ver que una conexión de cada sensor está directamente conectada a tierra, por lo que la segunda conexión parece transmitir/recibir las señales (parece obvio). También hay un pequeño transformador conectado en cada conexión de sensor que parece ser utilizado para aumentar el voltaje de la señal y así empujar el transductor piezoeléctrico (posiblemente) de cada sensor.
Creo que era hora de encender el sistema. Conecté la unidad principal a la alimentación, así como la pantalla LCD a la unidad principal para recibir información y saber en qué paso estaba trabajando. Me apoyé de un osciloscopio. Comencé a leer los pines de cada conector de sensor con los sensores desconectados, tratando de encontrar un patrón común. A primera vista, la forma de onda que sale del sensor con conector 1 parece una señal de onda cuadrada periódica.


Señales.
Al intentar con el conector 2, la señal parece ser la misma con la frecuencia de la onda cuadrada que permanece en 40.12khz. Con más detalle, lo describiría como una señal de 14 pulsos cuadrados de 40.12khz que se repite aproximadamente cada 160 ms. Por lo tanto, el dispositivo podría enviar estos 14 pulsos a cada sensor, luego cambiar el circuito del sensor a un modo de recepción y esperar a que la señal rebotada llegue hasta la próxima transmisión. Pero como la frecuencia de los 4 canales es la misma, la identificación de la reflexión (de qué sensor proviene el sonido) parece que no se implementa usando diferentes frecuencias. Así que veamos si hay un tiempo de sondeo diferente (intervalo de tiempo) para cada sensor. Al medir la distancia de tiempo entre cada canal, podemos ver que cada canal tiene exactamente 40 ms de diferencia del anterior.
De la señal del 1er canal a la señal del 2o canal hay un espacio de 40 milisegundos.
De la señal del 1er canal a la señal del 3r canal hay un espacio de 80 milisegundos.
De la señal del 1er canal a la señal del 4o canal hay un espacio de 120 milisegundos.
Por lo tanto, la Procesador Principal puede usar estos espacios de 40 ms para leer las señales rebotadas. Esto también significa una frecuencia de ~ 6.173Hz (1/160ms). Nuestros primeros hallazgos desde ahora son claros. Todos los sensores transmiten en la misma frecuencia pero en diferentes intervalos de tiempo.
Para el siguiente paso traté de leer todos los pines MCU y compararlos con la función de cada pin proporcionado por la hoja de datos.

Pin por Pin.
Desde el pin 1 al pin 5, todas las lecturas de la señal son obvias y se esperan. Los puertos UART 2 y 3 se utilizan para comunicarse con la pantalla LCD que muestra la distancia desde el obstáculo y su dirección. Esta interfaz se puede utilizar en combinación con un Arduino para cualquier aplicación DIY que quieras hacer. El pin 6 es un pin externo controlado por interrupciones y leemos una señal de entrada de onda cuadrada que no es periódica y estable, lo que lo hace más interesante y lo acerca al hecho de que este pin puede leer y descodificar las señales rebotadas (hacer todo el trabajo). En la siguiente imagen se puede ver la forma de onda en ese pin. Como se observa, hay un pequeño espacio después de la 12ª onda cuadrada y luego sigue otra forma de onda. La siguiente forma de onda es el reflejo y cambia su frecuencia dependiendo de la distancia del obstáculo. En combinación con un temporizador interno el MCU puede identificar fácilmente la frecuencia de lectura y hacer sus cálculos para obtener la distancia real del objeto.

El pin 7 también es un pin de interrupción externo, pero el osciloscopio lee una onda cuadrada de 6.182 hz. No podemos estar seguros aún si esta onda cuadrada está saliendo del pin 7 o si va a entrar.

Pin 8.
En el pin 8 tenemos una onda cuadrada de 24.71hz. En el pin 9 hay una forma de onda de 12.35 hz que seguí usando en el osciloscopio junto con un medidor de continuidad y encontré una implementación muy interesante. Al parecer, el temporizador 1 está generando esta forma de onda, luego se invierte a través del Trigger Schmitt, se filtra y se convierte en una señal de CC y luego esta señal se envía al pin RESET del MCU a través del Trigger Schmitt, invirtiendo nuevamente su polaridad. Mediante esta implementación, cuando el MCU normalmente se está ejecutando, proporciona 12.35 hz que luego se invierte, se filtra y se invierte nuevamente como resultado a un voltaje cero. Cuando algo falla con el MCU (Crashea – Con un Loop infinito, etc.) el T1 deja de generar esta frecuencia, la salida de toda la implementación anterior se convierte en un ALTO, lo que activa el reinicio del MCU. Este es un «perro guardián» muy inteligente y es algo que veo por primera vez.
Aquí el esquemático de esta implementación tan interesante.

Los pines 16 al 19 buscan controlar los transductores actuales ya que son 4 pines idénticos que generan la misma frecuencia que la que leí en los sensores pero en diferentes intervalos de tiempo.

Terminando con todos los pines, intenté seguir adelante y verificar el enrutamiento de los 4 pines de 6.173 KHz con un medidor de continuidad y una luz de escritorio en la parte posterior del PCB. Como estos pines son 4 en total, probablemente tengan que ver con los cuatro sensores. La continuidad muestra que cada uno de estos pines está conectado al pin Habilitador en cada canal del interruptor analógico. El Interruptor analógico consta de 4 interruptores analógicos, cada uno con 2 pines que se pueden puentear y un pin que es el pin Habilitador, y, de hecho, este pin activa el puente correspondiente del interruptor. Al verificar los pines del Circuito Integrado y al usar su hoja de datos, descubrí que uno de los pines de todos los interruptores analógicos está conectado al filtro/amplificador y el otro está conectado a la parte frontal analógica del sensor correspondiente. Así que el diagrama lógico se ve como el siguiente.

Las señales entrantes de cada sensor llegan al conmutador analógico y la MCU que utiliza las cuatro ondas cuadradas de 6.173Hz selecciona qué entrada del sensor desea que se dirija a través del Filter & Amplifier al MCU, y finalmente, se decodifique. Como se ve en la descripción anterior, el Pin7 (INT1) no se usa como un pin de interrupción externo, sino como un pin de salida que genera una forma de onda de 6.173Hz. Las cuatro ondas cuadradas de 6.173Hz están en diferentes intervalos de tiempo.



Aquí está la forma de onda de 6.173 kHz (amarillo) en combinación con la frecuencia del transductor de 40 kHz (rojo).

Con respecto a cómo se hacela transmisión de señales para hacer que los sensores emitan sonido, las señales de sonido salen de los pines de la MCU (formas de onda de 40 khz descritas anteriormente) y luego pasan por el extremo frontal analógico, que también amplifica la señal con los transformadores y finalmente activa el transductor.

Concluyendo.
Combinando todos los hallazgos anteriores podemos separar los circuitos en el PCB como se muestra a continuación.

Al final, sentí mucha curiosidad por descubrir cómo se ven los sensores y cómo están hechos. Así que intenté desarmarlos o, mejor dicho, destruirlos.
Aquí las imágenes.


Como puede ver en las imágenes de arriba, todo el envoltorio está lleno de una resina elástica, algo así como silicón y justo encima del transductor hay un material textil blanco y suave, como una esponja. Se alcanza a ver en la foto de arriba. El transductor en sí es, de hecho, un transductor piezoeléctrico, Muy similar, quizás del mismo tamaño, a los que puedes encontrar en las tarjetas de Navidad que reproducen canciones de Navidad cuando las abres.
Aquí concluye la historia de Haris y su descubrimiento al hacer ingeniería inversa del sistema de Sensores de Reversa de un Coche.
Entra a nuestra tienda aquí y encuentra los productos con precio especial.
Conoce el blog de Haris aquí.



{kind=link}
{kind=link}