
Motor Shield Arduino L293
$99.00 IVA Incluido
Hay existencias
Información:
Shield de motores con 4 puente-H’s completos, basada en dos L293D, puede manejar 4 cargas inductivas de 0.6 A por canal (4 relés, 4 solenoides, 4 motores DC ó 2 motores paso a paso unipolares o bipolares), permite controlar velocidad y dirección de giro en motores. También provee conector para 2 servos de 5 V.
Especificación:
-Incopora 2 circuitos integrados L293D proporcionando 4 puentes-H completos, -Protección contra sobre carga térmica, -Diodos de protección contra voltajes inversos generados por las cargas inductivas, -4 canales (M1, M2, M3 y M4) para controlar igual número de cargas inductivas como motores DC, solenoides, relés, ó 2 motores paso a paso unipolares o -bipolares de entre 4.5 V y 25 V, -En el caso de motores es posible controlar tanto su velocidad como su dirección de giro, -Control de velocidad de motores DC con resolución de 8 bits, -Control de motores paso a paso con 1 y 2 bobinas en modo sencillo, doble (mayor torque), intercalado (medio paso) y micro pasos, -2 conectores independientes para controlar 2 servos pequeños de 5 V (Pines digitales 9 y 10), -Corriente máxima continua en cada una de las salidas M1, M2, M3 y M4: 600 mA (0.6 A), -Corriente máxima pico no repetitivo en cada una de las salidas M1, M2, M3 y M4: 1.2 A, -Resistores de pull-down que mantienen los motores deshabilitados durante el encendido, -Requiere fuente externa para la alimentación de las cargas en las salidas M1, M2, M3 y M4. Puede empleada la fuente externa conectada a la placa Arduino o a la shield con selección mediante el jumper «PWR», -Bloques de terminales de tornillo para calibres 18 a 26 AWG, -Botón de reset para la placa Arduino, -Compatibilidad probada con Arduino Diecimila, Duemilanove, UNO y Mega 1280 & 2560
Aplicaciones:
Control de motores, control de servomotores.
Debes acceder para publicar una valoración.
También te recomendamos…
Productos relacionados
-

ProtoShield para Arduino UNO con Protoboard
$120.00 IVA Incluido Añadir al carrito -
Arduino UNO Genérico SMD con Cable.
$198.00 IVA Incluido Añadir al carrito -
Arduino LEONARDO Generico
$298.00 IVA Incluido Añadir al carrito -
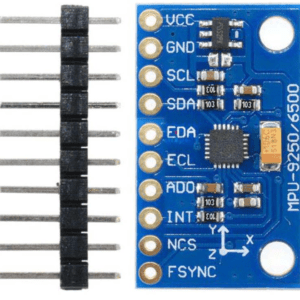
MPU-9250 Módulo Acelerómetro y Giroscopio
$289.00 IVA Incluido Añadir al carrito -
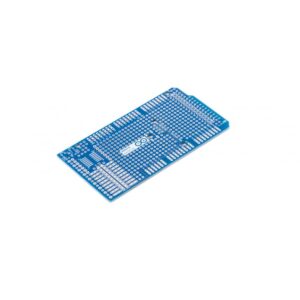
Protoshield para Arduino MEGA
$179.00 IVA Incluido Añadir al carrito -
Arduino Leonardo
$809.00 IVA Incluido Añadir al carrito




Valoraciones
No hay valoraciones aún.